
How we test B-finder technology?
posted on April 26, 2019
In 2017 our company EMPEKO have started project co-financed by the National Centre for Research and Development with the budget of ca. 500 000 EUR. During this project we have built the prototype of B-finder, prepared the 150x150m test field, made the installation on wind turbine and performed 15-month long prototype tests in real conditions. The project is completed and its result is the first T series of B-finder system: TB50, TB100, TBSN50, TBSN100, TBS50 and TBS100.
Today, when I write this text, the prototype is still in operation and we are using it for the development of new and additional functionalities of B-finder technology. During this period the system is in operation continuously day and night, during two winters, two springs, summer and autumn in changeable weather conditions included rain, snow, fog, hail, air temperatures range of –19°C to 35°C and wind speed up to 19 m/s (however B-finder hardware is prepared for air temperature range of -40°C to 60°C and wind speed up to 147 m/s).

Fig. 1. Simulation of bat/small bird flight down after collision – the test tube is falling down on the field test from 100 m above the ground.
Long tests in real conditions gave us information about the hardware endurance as well the opportunity to perform series of tests for the software configuration and development. Finally, we have tested detection of objects in different environmental conditions. We made every effort to proof real collisions: the preparation of special test field and every day field control (6 months), every second day field control (4 months), once a week (2 months). The frequency of field controls decreased with the increase of the system’s effectiveness. Additionally, we have performed >800 simulations of bats and birds flight down after collision to know the efficiency of detection in different weather conditions included the air temperature range from -5°C up to 32°C, rain, snow, day and night. We collected thousands hours of recordings and we’ve spent thousands hours of doing analysis since we started the development of B-finder technology.
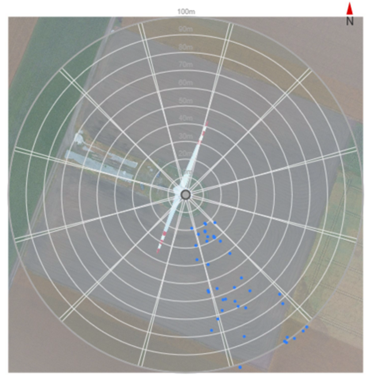
Fig. 2. Position of detected test tubes (carcass equivalent) on the ground after one series of field test on 17 Aug 2018. The printscreen from B-finder TBS100 user panel.
Michał
B-finder CEO